Thi thử trắc nghiệm môn Lý thuyết điều khiển tự động online - Đề #8
Câu 1:
Hàm truyền của hiệu chỉnh tích phân tỉ lệ PI(proportional integral) liên tục có dạng:
Câu 2:
Tần số cắt biên:
Câu 3:
Đơn vị dB/dec có nghĩa là:
Câu 4:
Cho hệ có phương trình đặc trưng: ${s^4} + 2{s^3} + 2{s^2} + 8s + 1 = 0$
Câu 5:
Hệ thống liên tục ổn định nếu tất cả các nghiệm của phương trình đặc tính:
Câu 6:
Hàm truyền $G(s) = \frac{{C(s)}}{{R(s)}}$ của hệ thống ở hình trên là:
Câu 7:
Khâu hiệu chỉnh PI (Proportional Integral ) có đặc điểm là:
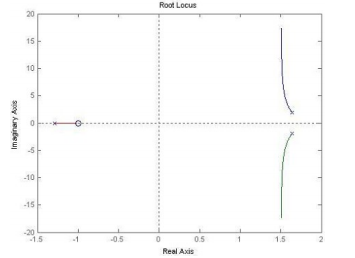
Câu 8:
Hệ thống có quỹ đạo nghiệm số như hình vẽ:

Câu 9:
Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với: $\left\{ \begin{array}{l}x(t) = Ax(t) + Br(t)\\c(t) = Cx(t)\end{array} \right.$
Câu 10:
Bộ chuyển đổi D/A:
Câu 11:
Hệ thống có quỹ đạo nghiệm số như hình vẽ:
Câu 12:
Định nghĩa độ dự trữ ổn định:
Câu 13:
Một trong những qui tắc của quĩ đạo nghiệm số:
Câu 14:
Khâu vi phân lý tưởng có hàm truyền G(s) = s:
Câu 15:
Biểu đồ Bode được vẽ trong hệ tọa độ vuông góc, trong đó:
Câu 16:
Cho hệ có phương trình đặc trưng ${s^3} + 20{s^2} + 10s + 100 = 0$
Câu 17:
Chu kỳ lấy mẫu T là:
Câu 18:
Bộ bù trễ pha được sử dụng khi:
Câu 19:
Theo định lý Shanon để có thể phục hồi dữ liệu sau khi lấy mẫu mà không bị méo dạng thì:
Câu 20:
Quan hệ giữa tín hiệu vào và tín hiệu ra của hệ thống điều khiển rời rạc được mô tả bằng:
Câu 21:
Điều khiển là quá trình:
Câu 22:
Quỹ đạo nghiệm số của hệ rời rạc:
Câu 23:
Tín hiệu vào của bộ chuyển đổi D/A:
Câu 24:
Hệ thống hồi tiếp âm đơn vị; có hàm truyền vòng hở: $G(s) = \frac{{K(s + 1)}}{{s{{(s + 2)}^2}(s + 5)}}$
Câu 25:
Quĩ đạo nghiệm số là: