Thi thử trắc nghiệm môn Lý thuyết điều khiển tự động online - Đề #7
Câu 1:
G(jω)=P(ω)+jQ(ω)=M(ω)ejφ(ω), trong đó:
Câu 2:
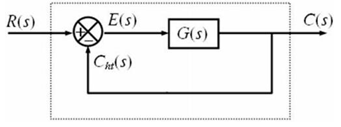
Hàm truyền vòng kín của hệ thống hồi tiếp dương là:
.PNG)
Câu 3:
Cho hệ có phương trình đặc trưng. Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
Câu 4:
: Biến đổi Laplace của hàm nấc đơn vị (step) f(t)=1(t):
Câu 5:
Cho hệ có phương trình đặc trưng s3+(K+2)s2+2Ks+10=0 . Hãy xác định K để hệ thống ổn định:
Câu 6:
Cho phương trình 2s4+s3+3s2+5s+10=0 .Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
Câu 7:
Sơ đồ khối hệ thống điều khiển vòng kín gồm có các phần tử cơ bản sau:
Câu 8:
Điều kiện cần để hệ thống liên tục ổn định theo tiêu chuẩn ổn định đại số là:
Câu 9:
Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau:
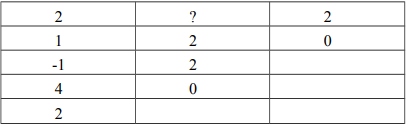
Phần tử “?” có giá trị bằng:
Câu 10:
Cho hệ thống có phương trình đặc trưng: 2s4 +s3 + 3s2 + 2s + 2 = 0 . Bảng Routh của hệ thống được cho như sau:
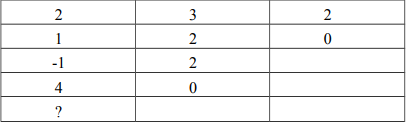
Phần tử “?” có giá trị bằng:
Câu 11:
Hàm truyền đạt $G(s) = \frac{{{V_o}(s)}}{{{V_i}(s)}}$ của mạch điện ở hình sau là:
.png)
Câu 12:
Cho hàm truyền $G(s) = \frac{5}{{{s^3} + 8{s^2} + 9s + 2}}$ hãy lập phương trình trạng thái:
Câu 13:
Đặc tính tần số của hệ thống là:
Câu 14:
Cho hàm truyền ,hãy lập phương trình trạng thái:
Câu 15:
Hàm truyền của hiệu chỉnh vi phân tỉ lệ PD (proportional derivative) liên tục có dạng:
Câu 16:
Hệ thống rời rạc bậc n được mô tả bằng:
Câu 17:
Hệ MIMO là hệ thống có:
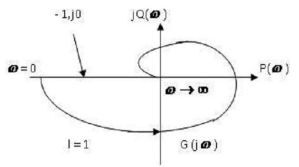
Câu 18:
Cho hệ thống hở có đặc tính tần số như hình vẽ . Xét tính ổn định của hệ thống:
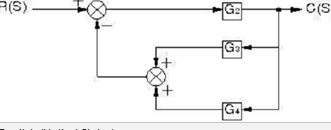
Câu 19:
Hàm truyền $G(s) = \frac{{C(s)}}{{R(s)}}$ của hệ thống ở hình trên là:
Câu 20:
Hàm truyền vòng kín của hệ thống hồi tiếp âm đơn vị là:
Câu 21:
Hàm truyền vòng kín của hệ thống hồi tiếp dương đơn vị là:
.PNG)
Câu 22:
Cho phương trình ${s^2} + 25{s^2} + 250s + 10 = 0$. Xét tính ổn định của hệ thống, và cho biết có bao nhiêu nghiệm có phần thực dương:
Câu 23:
Hàm truyền của hiệu chỉnh tỉ lệ P (proportional) liên tục có dạng:
Câu 24:
Hệ phương trình trạng thái được mô tả dưới dạng ma trận, với:
$\left\{ \begin{array}{l}x(t) = A(x) + Br(t)\\C(t) = Cx(t)\end{array} \right.$
Câu 25:
Các trạng thái cân bằng gồm: